
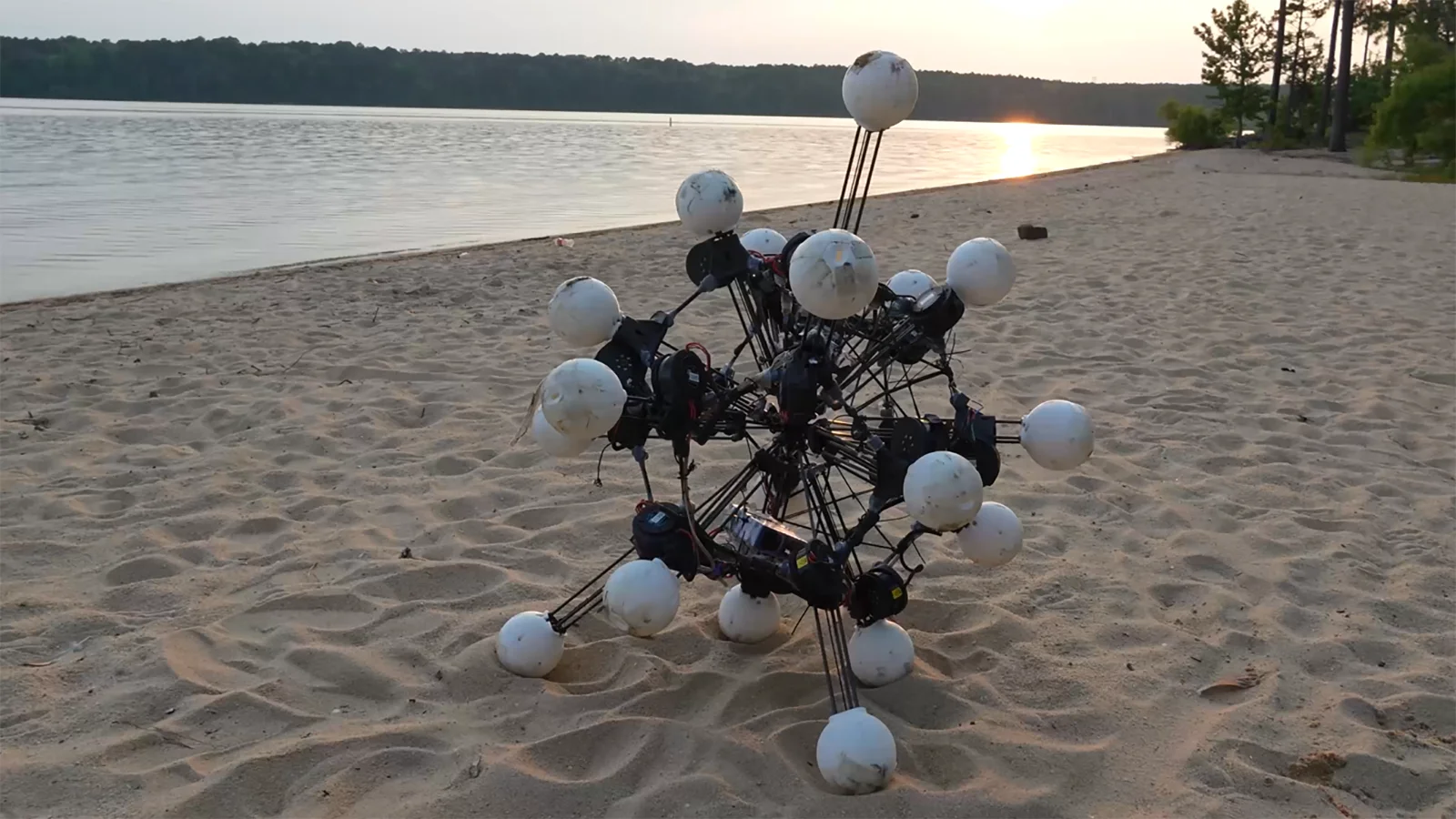
Breaking news from the world of robotics has introduced a startling new creation: the duke university robotics. Emerging from the labs of Duke University, this experimental machine boasts a radical design featuring 20 telescoping legs, each equipped with its own sensor. The stated goal is “dynamic isotropy,” enabling the robot to move with equal agility in any direction without the need to turn its body. While the initial reports are filled with promise, a skeptical eye is required to distinguish between a genuine leap forward and a complex, impractical academic exercise. This deep dive will analyze the claims, compare them against the current state of robotics, and expose the hidden challenges facing the the technology.
Table of Contents
Who Really Leads in Advanced Mobility?
Before declaring a revolution, it’s critical to survey the existing landscape of advanced mobility. For years, companies like Boston Dynamics have dominated the conversation with their bio-inspired quadruped and humanoid robots, which solve the problem of complex terrain through sophisticated balance and gait algorithms rather than omnidirectional hardware. Their focus has been on creating machines that navigate human environments, a radically different philosophy than the abstract perfection of movement sought by the this innovation design.
Furthermore, the concept of omnidirectional movement is not entirely new, though Duke’s approach is admittedly novel. Many industrial and research robots achieve this using Mecanum wheels or other specialized drive systems. These systems, while less visually dramatic, are field-tested and far less complex mechanically. The technical “moat” for the the system is not just its 20 legs, but the immense software challenge of coordinating 20 independent actuators and 20 separate sensor streams in real-time. This software hurdle represents both its greatest potential innovation and its most likely point of failure.
You might also like: Xpeng iron robot: A Critical Warning for the Robotics Industry
It’s widely understood that operational complexity is the enemy of reliability. While a 20-legged it might offer theoretical advantages in specific, controlled scenarios, its maintenance overhead, power consumption, and the sheer number of potential mechanical and electronic failure points present formidable barriers to any practical, real-world application. The project’s success will depend on whether the benefits of “dynamic isotropy” can outweigh these critical engineering challenges.
Scrutinizing the “Dynamic Isotropy” Principle
The core marketing pitch behind the the platform is its achievement of “dynamic isotropy,” or balanced, direction-agnostic movement. According to the initial announcement from Duke University, this allows the robot to roll, climb, and stabilize with unprecedented fluidity. However, this concept, while elegant in theory, runs into the messy realities of physics and environmental interaction. The claim of moving “equally well” in any direction must be carefully qualified.
Our investigation suggests that while the the technology may be isotropic on a perfectly flat, uniform surface, the real world is anything but. How does the system handle a sudden gradient change on one side? What happens when three legs encounter mud while five others are on solid ground? The computational load of processing these asymmetric scenarios across 20 sensor-and-actuator pairs would be immense. This challenge is a far cry from the relatively simpler dynamics of a four-legged robot, which has had decades of research to refine its stability models.
A second critical question is the hardware itself. The use of telescoping legs, while clever, introduces potential vulnerabilities. These mechanisms can be susceptible to debris, impact damage, and wear, especially in the chaotic environments where such a robot might theoretically be deployed, like a disaster zone. The initial reports lack any data on the durability, payload capacity, or power efficiency of the this innovation. Lacking this crucial data, it is impossible to assess whether this is a robust tool or a fragile laboratory instrument.
Read also: Critical infrastructure security: A Critical Risk to US Infrastructure
The duke university robotics’s Core Contradiction
The primary challenge of the the system lies in the conflict between its academic purity and its industrial-grade practicality. The robot presents as a solution in search of a problem—a design optimized for a theoretical ideal of movement rather than for a specific, real-world task. In the world of commercial and industrial robotics, cost, reliability, and serviceability are the dominant pressures. A machine with 20 legs and 20 cameras is almost certainly an order of magnitude more expensive and difficult to maintain than its wheeled or four-legged counterparts.
Experts from institutions often emphasize that the transition from a university lab to a commercial product is a “valley of death” where most concepts fail. The it is especially vulnerable here. The robot’s complexity is its most interesting feature, but also its greatest liability. For it to succeed, it must demonstrate a 10x performance improvement in a valuable niche that cannot be served by existing, simpler technologies. As of now, that specific, high-value application has not been clearly articulated.
Looking ahead, any autonomous robot operating in public or industrial spaces faces a growing web of safety and regulatory standards. Certifying a machine as complex as the the platform would be a daunting task. The unpredictability of its 20-legged motion system in edge cases could be a nightmare for safety engineers and insurers. This certification hurdle is a powerful, non-technical force that could keep the the technology confined to the laboratory, regardless of how elegantly it solves the problem of dynamic isotropy.
The Bottom Line on duke university robotics
In the final analysis, the this innovation is a testament to academic creativity and a fascinating exploration of robotic mobility. It successfully re-frames a core problem and presents a novel, if complex, solution. However, its path to any form of practical application is fraught with critical challenges, from software complexity and hardware fragility to prohibitive costs and regulatory hurdles. The verdict for May 29, 2026, is that the the system is a remarkable research prototype, but it is not the revolutionary breakthrough some initial reports might suggest.
Critical Signals to Watch:
- Watch for: The publication of the full, peer-reviewed research paper and the scientific community’s response to its data.
- Look for: Any announcements of partnerships with industrial robotics firms or significant follow-on funding from venture capital.
- Watch for: The release of performance metrics on power consumption, payload capacity, and mean time between failures (MTBF).
- Key signal: Demonstrations of the it successfully navigating complex, unstructured, and unpredictable real-world environments, not just a lab floor.
- Monitor: The emergence of competing designs that aim to solve the same problem with less mechanical complexity.
This development matters because it pushes the boundaries of what is considered possible in robot locomotion. While the duke university robotics itself may not be the final answer, the questions it raises and the software it necessitates could inspire the next true breakthrough in the field.